რობოტი დეპალეტიზატორი
პროდუქტის დეტალები
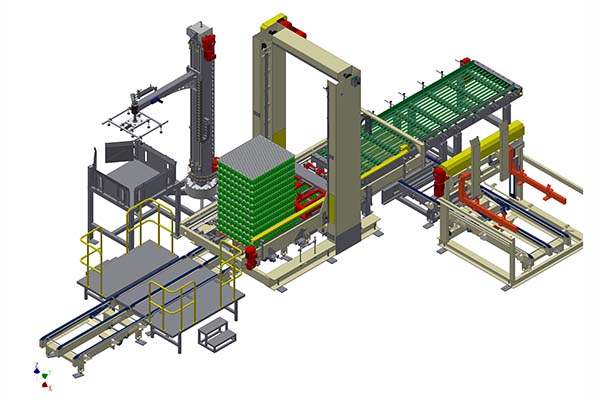
წარმოების დროს, პროდუქციის მთელი დასტა ჯაჭვური კონვეიერით გადაიტანება პალეტებიდან გადმოტვირთვის სადგურამდე, სადაც ამწევი მექანიზმი მთელ პალეტას პალეტებიდან გადმოტვირთვის სიმაღლემდე ასწევს, შემდეგ კი ფენებისშორისი ფურცლის შემწოვი მოწყობილობა აიღებს ფურცელს და მოათავსებს ფურცლების საცავში, ამის შემდეგ, გადამცემი დამჭერი გადაიტანს პროდუქციის მთელ ფენას კონვეიერზე, გაიმეორებს ზემოთ მოცემულ ქმედებებს მანამ, სანამ მთელი პალეტის გადმოტვირთვის დასრულება არ დასრულდება და ცარიელი პალეტები პალეტების შემგროვებელში არ გადავა.
აპლიკაცია
გამოდგება ყუთების, PET ბოთლების, შუშის ბოთლების, ქილების, პლასტმასის კასრების, რკინის კასრების და ა.შ. ავტომატური გადმოტვირთვისთვის.
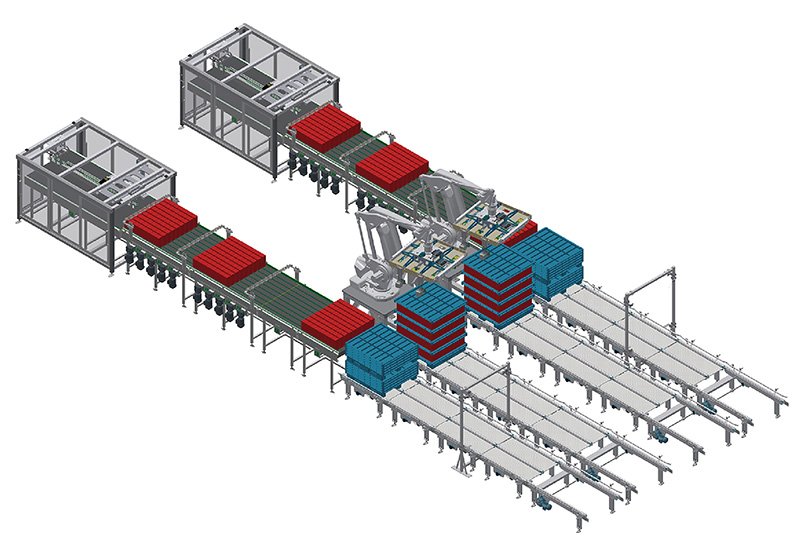
პროდუქტის ჩვენება


3D ნახატი

ელექტრო კონფიგურაცია
| რობოტის მკლავი | ABB/KUKA/FANUC |
| სააქციო საზოგადოება | სიმენსი |
| ვოლფსორი | დანფოსი |
| სერვოძრავა | ელაუ-სიმენსი |
| ფოტოელექტრული სენსორი | ავადმყოფი |
| პნევმატური კომპონენტები | SMC |
| სენსორული ეკრანი | სიმენსი |
| დაბალი ძაბვის აპარატურა | შნაიდერი |
| ტერმინალი | ფენიქსი |
| საავტომობილო | კერვა |
ტექნიკური პარამეტრი
| მოდელი | LI-RBD400 |
| წარმოების სიჩქარე | 24000 ბოთლი/საათში 48000 თავსახური/საათში 24000 ბოთლი/საათში |
| ელექტრომომარაგება | 3 x 380 ცვლადი დენი ±10%, 50HZ, 3PH+N+PE. |
მეტი ვიდეო შოუ
- ბოთლების რობოტი დეპალეტიზატორი გამყოფი და შერწყმის ხაზით
- რობოტი პალეტეზირება ყუთებისთვის გამყოფი და შერწყმის ხაზით